Error State Kalman Filter (ESKF) for three-degree-of-freedom orientation estimation using IMU (gyroscope + accelerometer) and scalar forward velocity.
Go to MOKUKU-INS/3dof for more details.
Algorithm Flow (Overview)
- Load data — IMU CSV and trajectory odom.txt; clip IMU to trajectory time range.
- Bias estimation — Use first N seconds from segment start to estimate accelerometer and gyroscope biases from gravity and near-zero angular velocity.
- Filter loop (per IMU frame):
- Predict: Integrate gyroscope to update R_wc; R_cm nearly constant; add process noise to P.
- Update (when
|dv/dt|below threshold): Compare accelerometer with expected specific force from kinematics (a_body = [0, dv/dt, 0] + ω×v, then subtract gravity); correct R_wc and R_cm via Kalman gain.
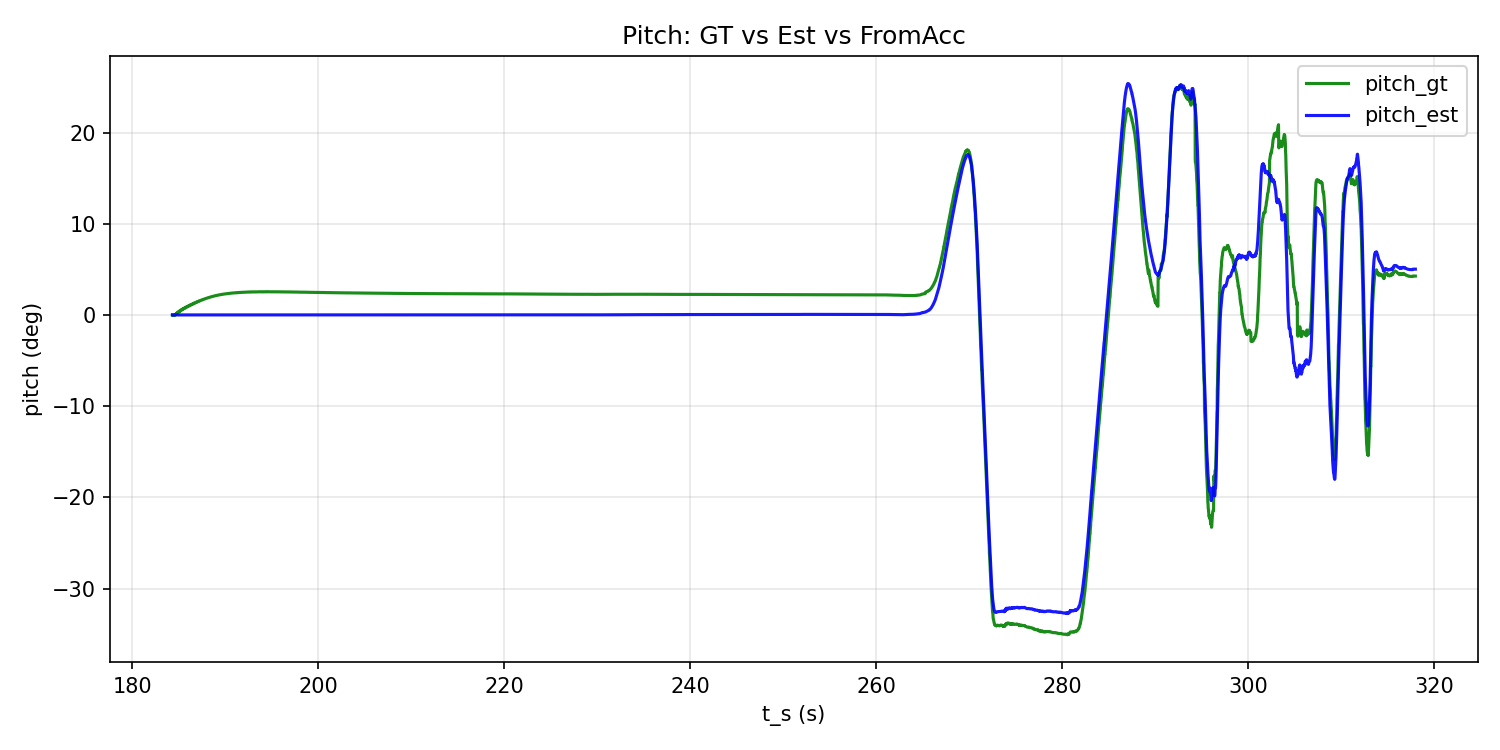
- Output — R_wc (vehicle-to-world), R_cm (device-to-vehicle); extract pitch for inclination.
Observation model: Expected specific force in IMU frame is h = R_cmᵀ · (a_body - R_wcᵀ·g), where a_body uses velocity derivative and Coriolis term. Residual y = acc_imu - h drives the correction.
Observability and Pitch Focus
Due to insufficient observation constraints, the filter is designed to focus on pitch angle estimation:
- Pitch: Observable from the accelerometer (gravity projection and longitudinal acceleration). The filter corrects pitch using the accelerometer residual.
- Yaw: Not observable from accelerometer alone; no magnetometer or other heading reference. Yaw drifts with gyroscope integration.
- Roll: Assumed small; weakly observable in full 3D motion.
Overall angle estimation (especially yaw and total 3D rotation) is therefore relatively dependent on gyroscope integration. The accelerometer mainly constrains pitch and roll to a lesser extent. Evaluation metrics (e.g. mean pitch error) focus on pitch, which is the best-constrained degree of freedom.
Limitations
- Yaw unobservable: No magnetometer or heading reference; yaw drifts with gyroscope integration. Total 3D rotation error can be large even when pitch is accurate.
- 2D motion assumption: Vehicle moves primarily along the forward (Y) axis; lateral velocity is neglected. Significant lateral motion degrades the observation model.
- External velocity required: Filter needs scalar forward velocity (from odometry, GNSS, or wheel encoder). No velocity estimation from IMU alone.
- Axis/sign convention sensitive: Accelerometer sign depends on sensor mounting (
inverse_imu_acc). Misalignment causes systematic pitch bias. - Bias estimation from static segment: Bias is estimated from the first N seconds of the processing segment. Thermal drift or motion during this period affects accuracy.
- dv/dt noise: Velocity derivative amplifies noise; large dv/dt triggers update skip. Very noisy velocity input degrades pitch estimation.